近日,南京大学生命科学学院、医药生物技术国家重点实验室的景键教授团队和物理学院的刘锋教授团队,以及美国纽约西奈山医学院Cropper和Weiss教授共同提出了一种解释动物可变性行为的神经环路机制。相关成果以“Synaptic mechanisms for motor variability in a feedforward network”为题于2020年6月19日在Science Advances上发表(https://advances.sciencemag.org/content/6/25/eaba4856)。成果被EurekAlert(https://eurekalert.org/pub_releases/2020-06/nuso-svp061220.php)和Medical Express等国外科技媒体深度报道,受到了广泛关注。
从无脊椎动物到脊椎动物(包括人类),行为的可变性是最常见的特征之一,有助于动物通过灵活的行为方式适应复杂的生存环境。因此,阐释行为可变性的神经机制正是神经生物学,尤其是行为神经科学亟待解决的前沿科学问题之一。不同于脊椎动物复杂的神经网络,海洋蜗牛-海兔(Aplysia californica)具有相对较少的神经细胞,并且单个细胞具有显著的特征,可以被轻松识别。借助海兔的神经环路优势,研究人员探究其摄食行为的可变性,发现在海兔摄食前馈运动神经网路中,特定神经元间的突触噪音和突触强度的复杂作用决定了运动输出的可变程度。
与高等动物的神经环路相似,海兔中控制摄食的神经环路主要由提供指令等信号的上游“高级中枢”和直接产生节律行为的下游“中枢模式发生器”两个部件组成。研究人员发现,上游高级中枢存在两种不同的神经元,都能够兴奋下游中枢模式发生器中一个关键的低兴奋性神经元。但是,其中一个上游兴奋性输入较弱,对下游神经元的激活不稳定,故诱发的运动程序是可变的;而另一个上游兴奋性输入较强(尽管信号本身也存在变化),足以稳定地激活下游中枢模式发生器,进而产生较为规律的运动程序。因此,中枢模式发生器的突触输入强度对运动输出的可变程度起到了关键的调控作用。之后,研究人员进一步构建神经网络模型,再现了生理学实验结果,并阐述了突触噪音也是产生可变运动的必要条件之一。总的来说,正是作用在中枢模式发生器中关键的低兴奋性神经元的可变性突触输入(包括突触强度和突触噪音)使海兔可以产生灵活多变的摄食行为。
我们知道,在哺乳动物(包括人)等高等动物中,为了灵活地应对不同的状况,行为同样存在不同程度的可变性。比如,人在湿漉易滑和干燥稳固的路面上的行走模式是不同的,在食用难以咀嚼的坚果和易于咀嚼的麦片粥时的咀嚼模式也是不同的。另外,运动程序的可变性在行为的学习及发育中也是极为必要的;比如,婴幼儿在蹒跚学步时,步伐会十分不稳定,但是不久后就能以较为规律的步伐行走了。研究人员将继续探究,上述这套突触机制是否同样适用于解释哺乳动物的某些行为可变性。
南京大学生科院和物理学院的博士后张果、博士生余可、王涛和硕士生陈婷婷为该论文共同第一作者,生科院和深圳鹏城实验室的景键教授及物理学院的刘锋教授为共同通讯作者。景键和刘锋教授均为南京大学脑科学研究院的PI。该研究得到了中国国家自然科学基金(31671097, 31861143036, 31371104)和美国NIH基金的资助。
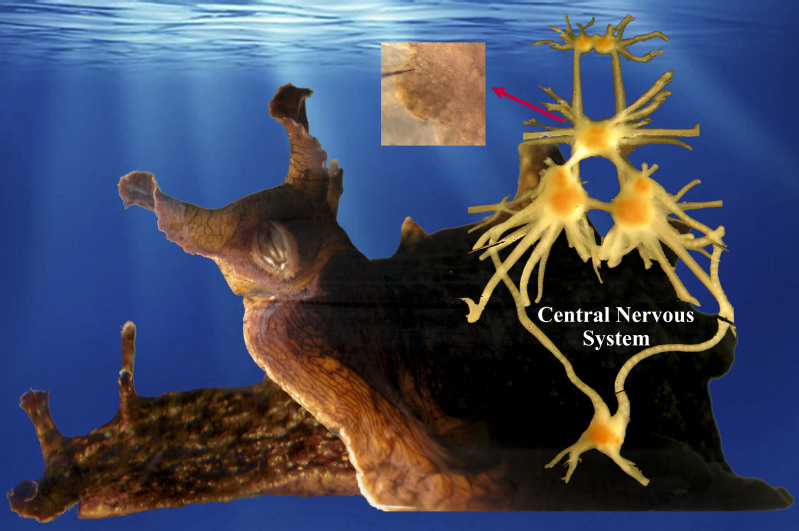
图一:海兔及其神经系统,以及可识别神经元。
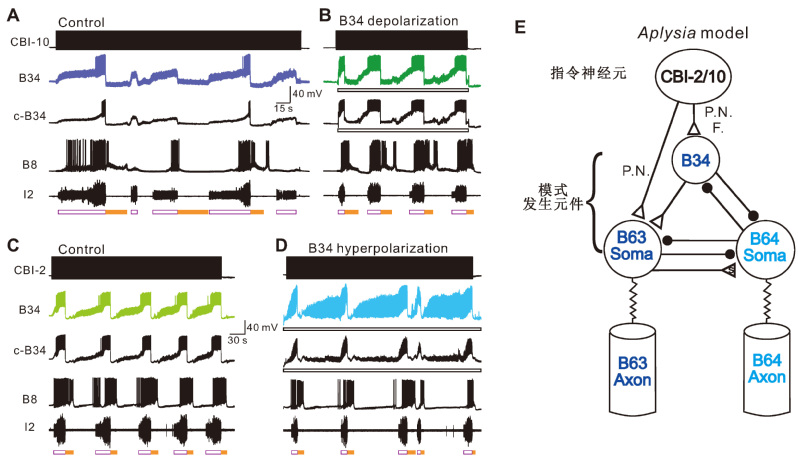
图二:中枢模式发生器中一个关键神经元(B34)在高级中枢-指令神经元CBI-10诱发的可变性运动程序(A-B)和CBI-2诱发的规律性运动程序(C-D)中所扮演的不同角色。E:海兔摄食环路的模型示意图。